

Modeling and Simulation of Traction System for High-speed EMU
Contents:
- Stability analysis of traction system
- Design and optimization of control system
- Model validation and verification
- Traction converter and optimization of control algorithm
- Design and control algorithm optimization of traction motor
- Thermal capacity evaluation of traction system
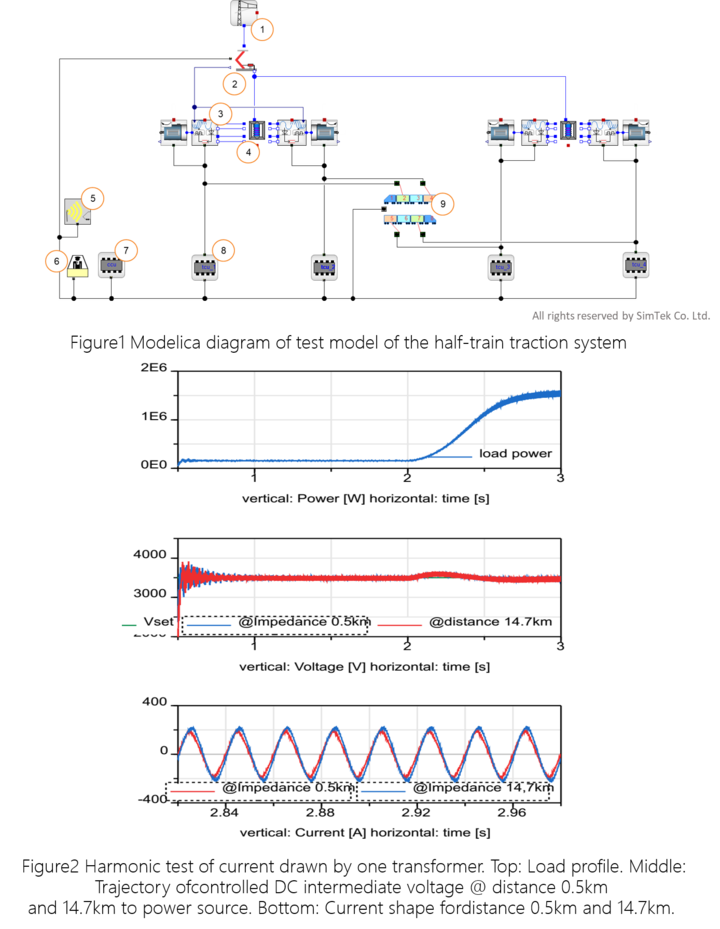
The traction system in High-speed EMU is mainly composed of high voltage transformer, traction converter and traction motor. The pantograph receives 25KV AC power from the catenary, and transfers the power to the traction transformer through the high voltage cable laid on the roof and the end of the vehicle. The transformer is connected to the motor converter unit. The rectifier module inside the converter unit converts AC voltage to DC voltage for driving motors. DC power supplies three-phase AC power with controllable voltage, current and frequency to traction motor through inverter.
Figure 2 shows the test results of the harmonic analysis on the grid side of the traction system, where the primary voltage and current of the transformer have been simulated. According to the results, the corresponding distortion rate of voltage and current, the equivalent interference current, and the harmonic content of the third, fifth and seventh grid side can be calculated.
Fault prediction of braking system
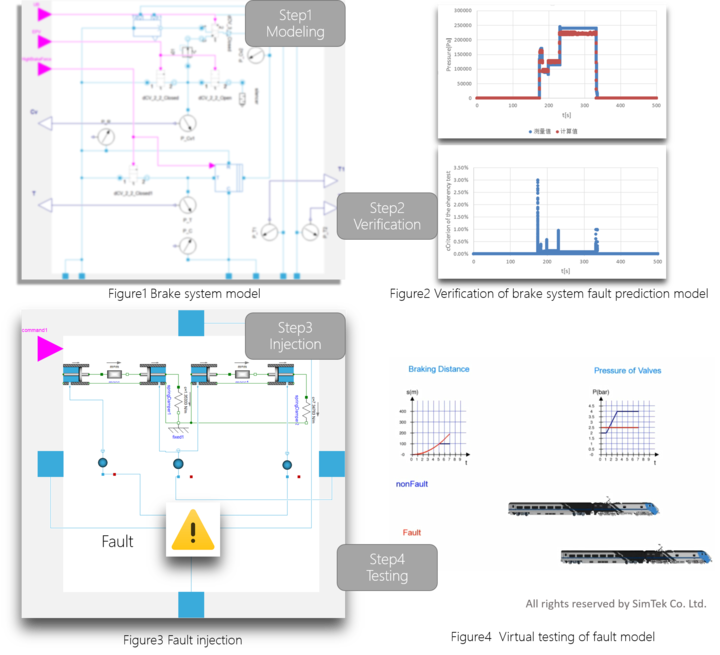
SimTek team has built a detailed system model for the braking system of EMUs using Modelica language, including the braking control model and the basic braking component model.
For the established braking system model, the measured value of the brake pressure during the braking process is compared with the calculated value of the model. It can be seen that the relative error between the model calculated value and the measured value is less than 5%. It shows that the model is suitable for a variety of different working conditions and has good accuracy. Based on the established brake system model, the fault model is injected to simulate the fault. A series of brake system models with different health grads are defined to generate fault samples to study the process of brake system fault generation.

